
What Is a NEMA 23 Stepper Motor?
The NEMA 23 is a stepper motor with a 57 mm × 57 mm (2.3 inch × 2.3 inch) mounting flange. The "23" in the name comes from the flange dimension in tenths of an inch. It sits in the middle of the NEMA stepper motor range — more torque than a NEMA 17, smaller and cheaper than a NEMA 34 — and that sweet spot is why it is probably the single most widely used stepper motor frame size in the world.
You will find NEMA 23 motors in desktop CNC routers, laser engravers, mid-size 3D printers, dispensing equipment, packaging machines, small robotic arms, and dozens of other applications that need reliable positioning at moderate torque levels. If your load demands between about 0.5 and 3.0 N·m and your speed stays below 1000–1500 RPM, this motor is almost certainly on your shortlist.
Cymotorix has been manufacturing NEMA 23 stepper motors (our 57BYG series) for over 20 years, supplying OEMs across six continents. This guide covers everything you need to evaluate and specify this motor for your project.

NEMA 23 Dimensions and Mounting
All NEMA 23 motors share the same flange footprint and mounting hole pattern regardless of manufacturer. This interchangeability is the main reason the NEMA standard exists — you can swap a motor from one supplier to another without redesigning your bracket.
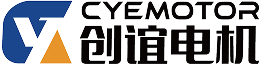
Key mechanical dimensions:
Flange size: 57.2 mm × 57.2 mm (2.3" × 2.3").
Mounting holes: 4 × M5 tapped holes on a 47.14 mm bolt circle, spaced at 47.14 mm × 47.14 mm center-to-center.
Shaft diameter: 6.35 mm (1/4") with a flat, or 8.0 mm with a flat on higher-torque models. The 8 mm shaft is recommended for motors above 1.5 N·m to handle the higher radial and torsional loads.
Body length: varies by torque rating. Shorter bodies (41–56 mm) produce less torque; longer bodies (76–112 mm) produce more. This is the main dimension that changes between NEMA 23 variants.
Pilot boss: 38.1 mm diameter, 1.6 mm protrusion. This locates the motor concentrically in the mounting plate.
When specifying a motor for an existing machine, the critical question is usually body length. A longer motor delivers more torque but requires more depth behind the mounting plate. Always check your available envelope before selecting a high-torque variant.
Electrical Specifications: What the Numbers Mean
A NEMA 23 datasheet lists several electrical parameters. Here is what they actually tell you about real-world performance:
Step angle (1.8°): the motor moves 1.8° per full step, giving 200 full steps per revolution. With a driver set to 1/16 microstepping, this becomes 3200 microsteps per revolution. Some NEMA 23 motors offer 0.9° step angle (400 steps/rev) for applications that need finer resolution.
Rated current (A/phase): the maximum continuous current each winding can handle without exceeding the rated temperature rise (typically 80°C above ambient). Common values range from 1.0 A to 4.2 A depending on the motor winding. Running at or near rated current gives maximum torque but also maximum heat.
Phase resistance (Ω): the DC resistance of each winding. Lower resistance means the motor draws more current at a given voltage and produces more torque at low speeds. Higher resistance motors are easier on the driver but lose torque faster as speed increases.
Inductance (mH): the winding inductance. This is the single biggest factor limiting high-speed performance. High-inductance windings resist rapid current changes, which limits how fast the driver can build up torque at higher step rates. A 3 mH winding will maintain torque at higher RPM than a 10 mH winding, all else being equal. If your application needs speed, look for low-inductance variants and pair them with a higher-voltage driver.
Holding torque (N·m): the maximum torque the motor can hold at standstill with rated current flowing. This is the headline spec most people look at, but it can be misleading — holding torque says nothing about torque at your actual operating speed. Always check the torque-speed curve.
Rotor inertia (g·cm²): the rotational inertia of the rotor itself. This matters for acceleration performance. A lower rotor inertia means the motor can accelerate faster when driving low-inertia loads. For high-inertia loads, the rotor inertia becomes less significant relative to the load.
Cymotorix NEMA 23 Product Range (57BYG Series)
We manufacture NEMA 23 stepper motors in both 2-phase (1.8°) and 3-phase (1.2°) configurations. Below are our representative 2-phase models:
| Model | Body (mm) | Current (A) | Resistance (Ω) | Inductance (mH) | Holding Torque (N·m) | Weight (kg) |
| 57BYG250-41 | 41 | 1.8 | 0.89 | 1.7 | 0.6 | 0.5 |
| 57BYG250-56 | 56 | 1.2 | 0.39 | 1.13 | 1.0 | 0.68 |
| 57BYG250-65 | 65 | 1.3 | 0.42 | 1.06 | 1.5 | 1.08 |
| 57BYG250-76 | 76 | 1.7 | 0.55 | 1.78 | 1.8 | 1.2 |
| 57BYG250-84 | 84 | 1.9 | 0.62 | 2.3 | 2.1 | 1.25 |
| 57BYG250-102 | 102 | 2.3 | 0.75 | 2.9 | 2.4 | 1.58 |
| 57BYG250-112 | 112 | 2.5 | 0.83 | 3.5 | 2.6 | 1.78 |
For applications demanding smoother motion, we also offer a 3-phase NEMA 23 line (57BYG350 series) with 1.2° step angle and holding torques from 0.9 to 2.2 N·m. The 3-phase design provides about 30% less torque ripple and runs noticeably quieter at low speeds.
All models are available with custom shaft modifications (double-ended shaft, extended shaft, hollow shaft), special winding voltages, and connector options for volume orders.
How to Choose the Right NEMA 23 Motor for Your Application
Step 1: Calculate Your Required Torque at Speed
Holding torque alone will not tell you if a motor works for your application. You need to know the torque demand at your actual operating speed. For a lead-screw-driven CNC axis, calculate the total force (cutting force + friction + gravity + acceleration inertia), then convert to motor torque using the screw pitch and drive ratio. Plot this against the motor’s torque-speed curve to confirm adequate margin.
Step 2: Factor in the Torque-Speed Rolloff
Every stepper motor loses torque as speed increases — this is physics, not a defect. The rate of rolloff depends mainly on winding inductance and driver supply voltage. A motor rated at 2.0 N·m holding torque might deliver only 0.8 N·m at 1000 RPM. If you need sustained torque at higher speeds, choose a low-inductance winding and use a 48V driver instead of a 24V driver. The higher voltage overcomes the back-EMF faster and maintains current in the windings at higher step rates.
Step 3: NEMA 23 vs. NEMA 17 vs. NEMA 34 — When to Size Up or Down
If your calculated torque demand at speed is below 0.4 N·m, a NEMA 17 (42 mm) motor is probably sufficient and saves cost and space. If your demand exceeds 2.5–3.0 N·m at your operating speed, step up to a NEMA 34 (86 mm). The NEMA 23 sweet spot is roughly 0.5–2.5 N·m at typical automation speeds (100–800 RPM). Staying within this range avoids both undersizing (stalls, missed steps) and oversizing (wasted cost, unnecessary weight and heat).
Step 4: Match the Driver
The driver matters as much as the motor. A good microstepping driver (1/16 or 1/32 subdivision) with current regulation and a supply voltage of 24–48V will get significantly more performance from a NEMA 23 motor than a basic full-step driver at 12V. Make sure the driver’s output current rating matches or exceeds the motor’s rated phase current. Cymotorix offers matched driver units for each motor model, pre-configured for optimal performance.
Wiring Configurations: 4-Wire vs. 6-Wire
NEMA 23 motors come in two wiring variants:
4-wire (bipolar): two windings, two wires each. This is the most common configuration and delivers the best torque performance per unit current. Requires a bipolar driver (which is standard today). This is what you should use unless you have a specific reason not to.
6-wire (unipolar/bipolar): two windings with center taps, three wires each. Can be run in unipolar mode (simpler driver, lower torque) or bipolar half-coil mode. The 6-wire option provides flexibility but the 4-wire bipolar connection is almost always the better choice for performance.
Wiring colors follow a convention but can vary by manufacturer. Always verify winding pairs with a multimeter before connecting a motor from a new source. Swapping winding pairs will cause the motor to vibrate instead of rotate.
Real-World Applications
CNC milling and routing. The NEMA 23 is the standard motor for benchtop and mid-size CNC machines. A 3-axis router using 57BYG250-76 (1.8 N·m) motors on ball-screw axes delivers reliable cutting in wood, plastic, and aluminum at feed rates up to 3000 mm/min.
Laser cutting and engraving. These systems need smooth motion at constant velocity. The NEMA 23 running on a quality microstepping driver produces clean, artifact-free engraving at moderate speeds.
3D printers (CoreXY, large-format FDM). Larger build volumes need more torque than a NEMA 17 can provide, especially for heavy direct-drive extruder carriages. A pair of 57BYG250-56 motors handles this with margin to spare.
Automated dispensing and dosing. Precision syringe pumps and peristaltic pump drives use NEMA 23 motors for their ability to deliver consistent low-speed torque and precise positional repeatability.
Camera and telescope tracking. Astronomical mount drives and professional camera sliders use NEMA 23 motors for their smooth, vibration-free motion at very low speeds.
Packaging and labeling machines. Index tables, label applicators, and carton positioning systems use NEMA 23 motors for their ability to start, stop, and position rapidly with high repeatability.

Installation Tips
Mount the motor on a flat, rigid surface. The NEMA 23 pilot boss should sit in a precisely bored or reamed hole in the mounting plate. A loose or oversized hole allows the motor to shift under load and introduces positioning error.
Use flexible jaw couplers (spider couplers) or bellows couplings between the motor shaft and the lead screw. Rigid couplings transmit vibration and do not tolerate any misalignment — even 0.1 mm of offset will cause premature bearing wear.
Keep motor leads as short as practical and use shielded cable if the run exceeds 1 meter. Long unshielded motor cables can radiate electromagnetic interference that affects nearby sensors and electronics.
Ensure your power supply is rated for the peak current draw of all motors on the machine, not just the rated current. During simultaneous acceleration of multiple axes, peak demand can easily exceed 2x the per-motor rated current.
Ready to Specify Your NEMA 23 Motors?
Cymotorix manufactures the full range of NEMA 23 stepper motors in both 2-phase and 3-phase configurations, with standard and custom shaft options. Whether you need 10 pieces for prototyping or 10,000 for production, our engineering team provides free technical consultation, motor sizing assistance, and competitive OEM pricing.
Contact us today with your torque, speed, and mounting requirements. We’ll recommend the right motor and driver combination within 24 hours.
Frequently Asked Questions
What does NEMA 23 mean?
NEMA 23 refers to the motor’s mounting flange size as defined by the National Electrical Manufacturers Association. The "23" represents 2.3 inches (approximately 57 mm), which is the width of the square mounting face. All NEMA 23 motors share the same flange dimensions and mounting hole pattern, making them interchangeable regardless of manufacturer.
What is the maximum torque of a NEMA 23 stepper motor?
Holding torque for NEMA 23 motors typically ranges from about 0.5 N·m (71 oz·in) for short-body models to about 3.0 N·m (425 oz·in) for the longest variants. Keep in mind that torque at operating speed will be lower than holding torque — check the torque-speed curve for the actual figure at your target RPM.
NEMA 23 vs. NEMA 34: when should I upgrade?
Consider moving to NEMA 34 when your torque demand at speed consistently exceeds 2.5 N·m, or when you need better torque retention above 1000 RPM. The NEMA 34 frame (86 mm) offers significantly higher torque capacity (up to 12+ N·m) but is heavier, larger, and more expensive. For most desktop and mid-range automation, NEMA 23 is the more cost-effective choice.
What voltage should I use with a NEMA 23 stepper motor?
The motor itself does not have a fixed operating voltage — the driver regulates the current regardless of supply voltage. However, higher supply voltage (36–48V) gives better high-speed torque retention because it allows the driver to push current into the windings faster. A 24V supply works fine for low-speed applications; for anything above 500 RPM with load, 36–48V is recommended.
Can I use a NEMA 23 stepper motor in a closed loop system?
Yes. Cymotorix offers closed loop versions of our NEMA 23 motors (57BYG250 series with encoder) paired with matched closed loop drivers. The encoder provides real-time position feedback that eliminates step loss and reduces heat generation. This is an excellent option if your application cannot tolerate any missed steps.
How many wires does a NEMA 23 stepper motor have?
Most NEMA 23 motors come in 4-wire (bipolar) or 6-wire (unipolar/bipolar) configurations. The 4-wire version is more common and provides better torque performance with standard bipolar drivers. The 6-wire version offers wiring flexibility but is less commonly needed with modern drivers.
-

Cymotorix
Stepper Motor & Servo Motor ManufacturerCymotorix is a China-based motor manufacturer with 20+ years of experience producing hybrid stepper motors, AC servo motors, and matched drivers for OEM customers worldwide.